

La bottega di Archimede – quarta parte
Progettare un subwoofer di altissime prestazioni – di Mario Di Cola e Gabriele Candini
di Mario Di Cola e Gabriele Candini
Il modello
Il sistema in questione è composto da una combinazione tra un amplificatore switching e un DSP. Tale DSP svolge il compito duale di prendersi cura dell’elaborazione del segnale, nel senso di filtraggio ed equalizzazione, sia di trattare le informazioni ricevute dal sensore di controllo, implementando in pratica l’anello di retroazione in tempo reale. Il bello di questo sistema è che può essere configurato semplicemente richiamando un file di preset. La stessa combinazione di altoparlanti e amplificatore, quindi, può essere configurata per adattarsi a diversi tipi di subwoofer. Basta connettersi al DSP con il computer e manipolare, tramite il software di controllo, una serie di parametri che ne regolano e ne ottimizzano il funzionamento per lo specifico impiego. Oltre a questo, è possibile operare in due modalità differenti: la prima è detta Virtual Speaker Model mentre la seconda è detta Pressure Model. Virtual Speaker Model è una modalità operativa praticamente automatica in cui, una volta assemblato e configurato tutto il sistema, ci si affida ad una ottimizzazione automatica dell’anello di retroazione per ottenere i parametri di Thiele and Small apparenti da noi desiderati per l’altoparlante. Grazie al controllo in pressione, il sistema farà in modo che l’altoparlante mostri al sistema i parametri desiderati, anche se in realtà i parametri T/S che esso ha fisicamente sono diversi. Per questa via, quindi, il progetto acustico può essere sviluppato con il metodo più tradizionale, cioè usando un simulatore con il quale lo si sviluppa, basandosi su particolari parametri di T/S desiderati per il raggiungimento di una certa risposta acustica. Grazie al sistema IPAL, poi, è possibile impostare tali parametri come target da ottenere attraverso la sintesi dell’altoparlante virtuale (virtual speaker, appunto) operata dal sistema.
Nella modalità operativa Pressure Model, invece, ci si affida ad un controllo un po’ più manuale (preferito da chi scrive…) che ha come obiettivo quello di impostare la massimizzazione dell’output acustico del sistema e la migliore stabilità ottenibile, qualunque sia la risultante risposta acustica. Questa poi, una volta ottimizzato il funzionamento del sistema, può essere ricondotta alla risposta desiderata attraverso l’uso dell’equalizzatore in ingresso. Ne vedremo di più un po’ più avanti nell’articolo.
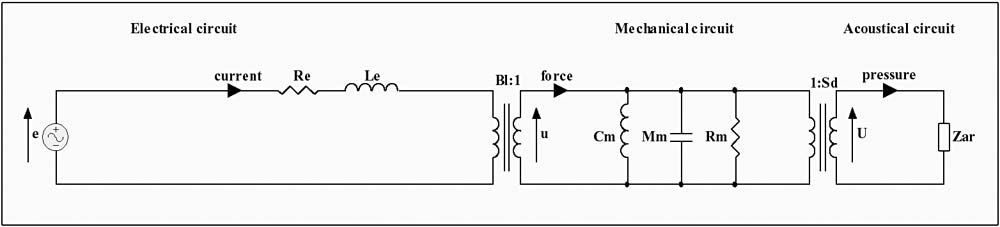 |
Fig. 1: Modello semplificato di un trasduttore elettrodinamico. |
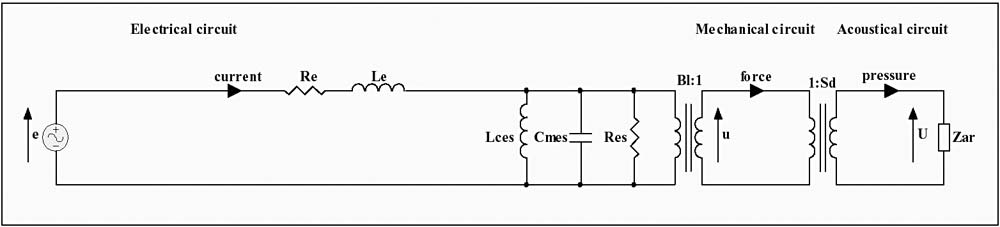 |
Fig. 2: Modello semplificato del trasduttore con lo spostamento al primario della cedevolezza, della massa e della resistenza meccanica attraverso un’equivalenza elettrica. |
Funzionamento del sistema
Il principiò operativo del sistema IPAL si comprende bene se si studia nei particolari proprio il concetto del Virtual Speaker Model, ma è lo stesso per entrambe le modalità operative.
Ad ogni modo, il sistema di emulazione del modello dell’altoparlante compreso nel meccanismo di funzionamento del sistema si basa su una struttura a doppio anello di controllo. Un anello più interno si prende cura di costruire un modello elettromeccanico dell’altoparlante molto stabile e prevedibile, e soprattutto ridotto ad un meccanismo essenziale di tipo Tensione d’Ingresso – Velocità d’Uscita in cui la sola relazione ingresso-uscita visibile dall’esterno è data dal fattore di forza B x L relativo al motore fisico dell’altoparlante. Questo elemento di base rende possibile avere un modello di riferimento che poi può essere regolato al desiderio dell’utente, inserendo i parametri virtuali in un modello numerico che, per sua natura, non è prono a modifiche durante il funzionamento. Il comportamento di un siffatto modello, tuttavia, è incapace di reagire opportunamente alle condizione acustiche al contorno, e la relazione tra tensione in ingresso e velocità in uscita che si otterrebbe sarebbe quella dell’altoparlante operante nello spazio vuoto. In altre parole, il comportamento dell’altoparlante nel modello sarebbe per nulla influenzato dalle forze e dal carico acustico che agisce sulle facce del cono. La misura di pressione differenziale effettuata dallo speciale sensore, che è parte del sistema, riporta la differenza di pressione tra la faccia anteriore e posteriore del cono, differenza questa che è data dal particolare carico acustico utilizzato, e usa queste informazioni per alterare il comportamento del modello di riferimento secondo le condizione acustiche in cui esso è impiegato.
Struttura del modello
Spieghiamo meglio il concetto attraverso una serie d’illustrazioni:
Il modello illustrato in figura 1 è quello semplificato di un trasduttore elettrodinamico. In esso vediamo il circuito elettrico d’ingresso semplificato ai valori di Re e Le (resistenza ed induttanza della bobina mobile) e tale riduzione rappresenta molto bene l’altoparlante nella gamma di funzionamento di un subwoofer. Tale circuito d’ingresso pilota direttamente il motore che è rappresentato da un trasformatore con rapporto di trasformazione BxL:1. Al secondario di questo trasformatore vi è la forza applicata al cono che è influenzata in qualche modo dai tre elementi meccanici più importanti: la cedevolezza, la massa e la resistenza meccanica al movimento.
Dal modello precedente di figura 1, è possibile passare con facilità al modello semplificato di figura 2 il quale è perfettamente equivalente al primo, ma vi si è operata una semplice trasformazione calcolando l’equivalente elettrico da porre al primario delle costanti meccaniche del sistema.
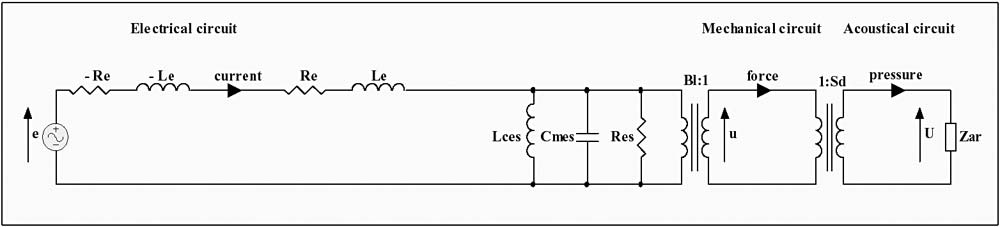 |
Fig. 3: Modello semplificato con aggiunta al primario di una resistenza ed una induttanza negative che possono cancellare (almeno in parte) i due parametri elettrici del trasduttore. |
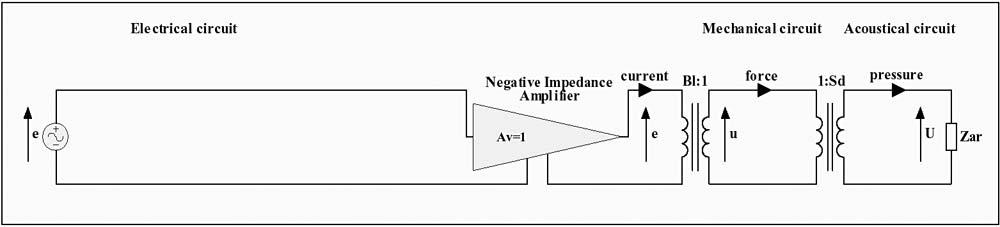 |
| Fig. 4: Circuito semplificato dove tutto il lato elettrico è stato sostituito da un amplificatore ad impedenza negativa. |
Da queste emerge chiaramente che passando di dominio in dominio le nostre grandezze di interesse sono:
1) tensione e corrente nel dominio elettrico;
2) forza e velocità nel dominio meccanico;
3) pressione e velocità di volume nel dominio
acustico.
A questo punto, grazie alle trasformazioni effettuate, è possibile immaginare un ulteriore passo in avanti nel nostro modello, quello riportato in figura 3.
Grazie alle equivalenze elettriche fatte al primario, si capisce che la reale influenza esercitata sul comportamento del trasduttore dalle corrispondenti grandezze meccaniche esiste solo in virtù del fatto che in serie all’altoparlante vi sono la resistenza e l’induttanza della bobina. Se inseriamo in serie ad esse una resistenza negativa (−Re) ed una induttanza negativa (−Le) entrambi uguali e contrarie ad Re e Le, il partitore rappresentato dalla serie Re + Le e dal blocco risonante Lces, Cmes, e Res sparisce come d’incanto permettendoci di compiere un ulteriore passo in avanti nella modellazione del circuito come in figura 4.
Quindi l’intero primario del trasformatore BxL:1 è stato sostituito da un elemento altamente desiderabile dove il segnale d’ingresso è inviato ad un semplice amplificatore a “buffer” che pilota il trasformatore BxL:1 con una capacità di corrente idealmente illimitata. Implementando tutto questo si ottiene il brillante risultato di avere una velocità della membrana e la sua relativa velocità di volume facilmente predicibili e completamente dipendenti dalle forze che agiscono sulla superficie della membrana stessa, stabilendo una relazione tra il movimento della membrana e il segnale in ingresso. La domanda di pressione, forza e corrente, imposte dalle caratteristiche acustiche al contorno in cui si opera, è quindi soddisfatta dalla capacità di corrente dell’amplificatore ad impedenza negativa che è posto al primario del trasformatore BxL:1, che è l’ingresso dell’altoparlante.
Molto semplicemente, una tensione in ingresso corrisponderà ad una velocità della membrana con una proporzionalità di 1/BxL.


